myCobot Pro 600

1 Structural parameters
1.1 Manipulator parameters
| index | parameter |
|---|---|
| name | Commercial version of elephant cooperative manipulator |
| model | myCobot pro 600 |
| freedom | 6 |
| Maximum load | 2kg |
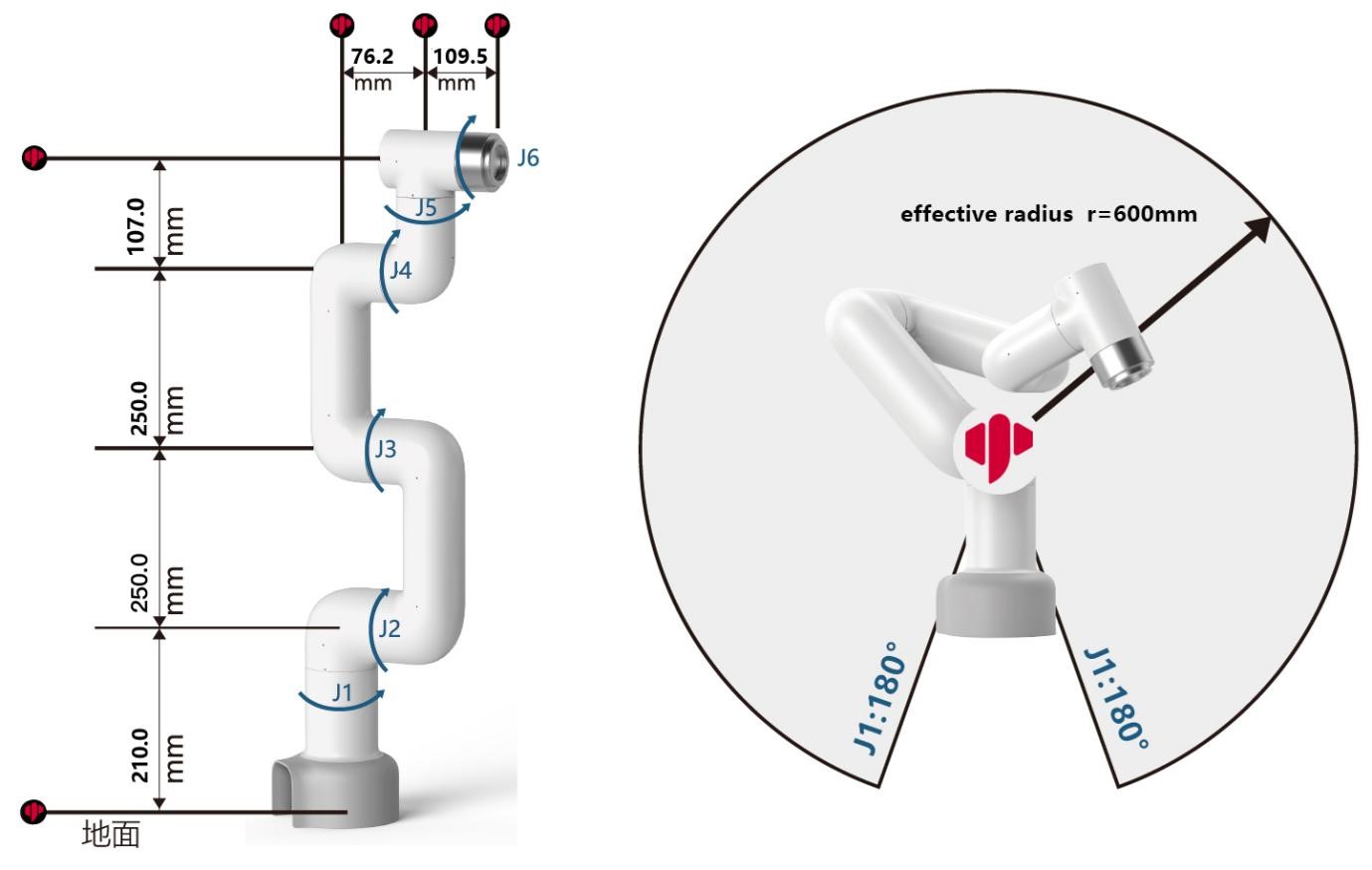
| Working radius | 600mm |
| Repeat positioning accuracy | ±0.5mm |
| weight | 8.8kg |
| Power Supply | AC100-240V ,50/60HZ |
| IP Grade | IP42 |
| Material Science | Aluminum alloy, plastic, rubber |
| working temperature | 0-50℃ |
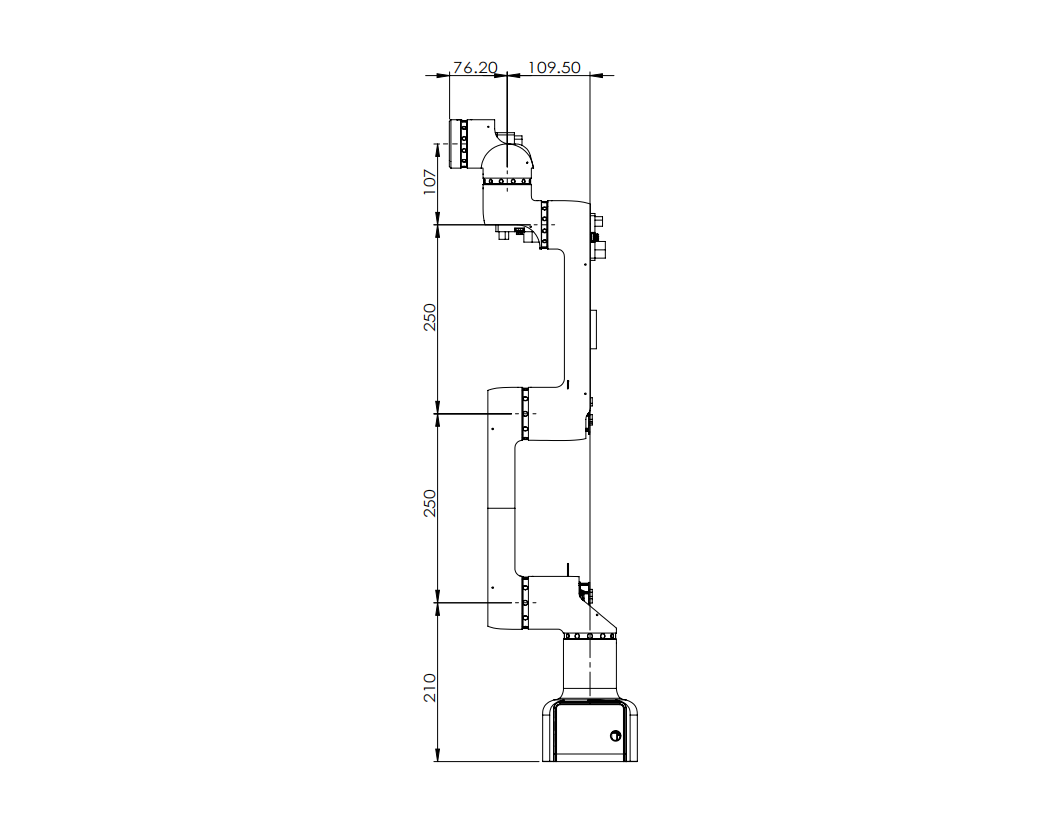
1.2 working space
1.4 Range of joint motion
| joint | Range |
|---|---|
| J1 | -180° ~ +180° |
| J2 | -270° ~ +90° |
| J3 | -150° ~ +150° |
| J4 | -260° ~ +80° |
| J5 | -168° ~ +168° |
| J6 | -174° ~ +174° |
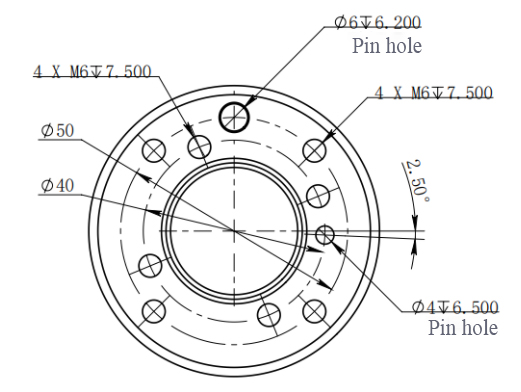
1.5 Hole position installation
- Robot base mounting flange The base plate is installed with M6 screws
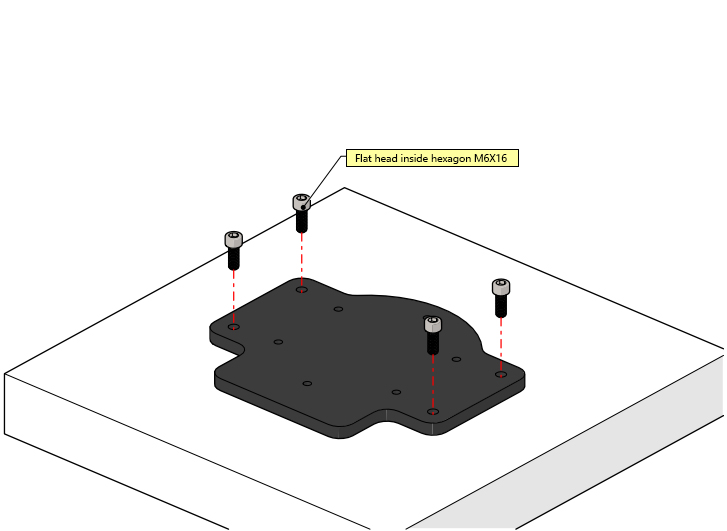
The mechanical arm base is installed with M6 screws
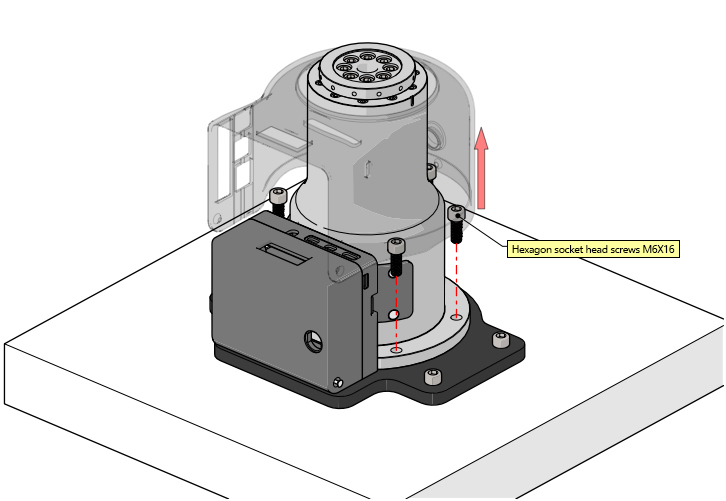
- Robot end mounting flange Screw thread hole at the end of mechanical arm
2 Electronic parameters
| index | parameter |
|---|---|
| SOC | Broadcom BCM2711 |
| CPU | 64bit 1.5GHz Tetranuclear |
| Bluetooth / wireless | Dual-band (24GHZ/50GHZ)IEEE80211B/G/N/AC Wireless WIF, Low power Bluetooth 5.0 |
| USB | USB3.0 x 2;USB2.0 x 2 |
| HDMI Interface | microHDMI x2 |
| IO Interface | twelve |
| Network Interface | Supports IEEE 1588 Gigabit Ethernet |
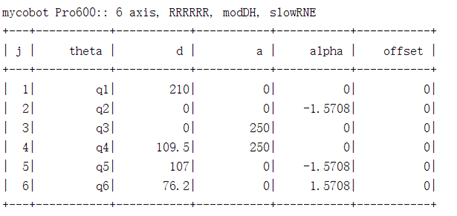
3 DH parameter
DH parameter:
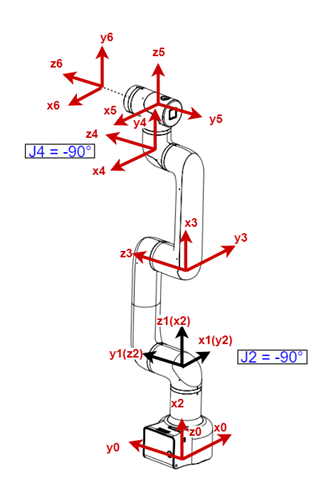
MDH Parameter table: